
詳情
天車在變速運(yùn)動(dòng)中吊具的速度變化會(huì)滯后于大車與小車的速度變化,從而不可避免的會(huì)發(fā)生吊具晃動(dòng)的情況,且由于物體慣性的存在、操作人員的操作不熟練等會(huì)加劇吊具的搖擺晃動(dòng),對(duì)設(shè)備以及附件相關(guān)的人員都會(huì)造成危害。為了消除這種速度變化滯后帶來(lái)的角度搖擺,千盟研發(fā)了防搖控制器。


設(shè)備型號(hào):QM-AS-100
輸入電源:24VDC/500mA
工作溫度:-30℃ ~ +85℃
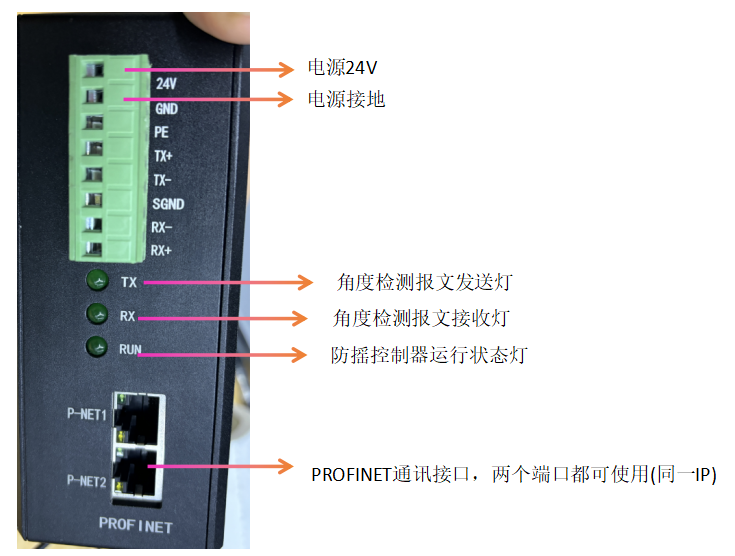
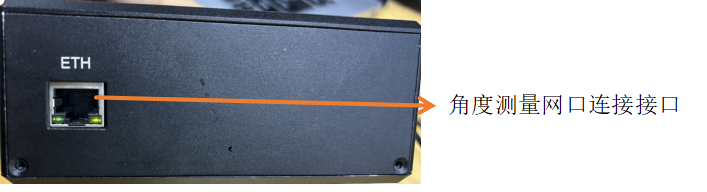
通訊接口:PROFINET、RS485、TCP/IP網(wǎng)口
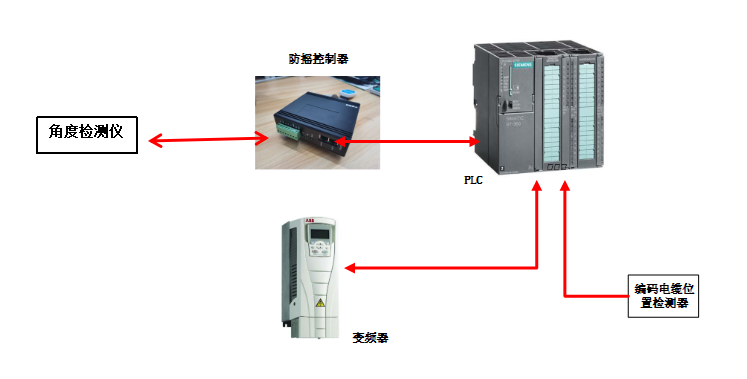
驅(qū)動(dòng)單元:大小車的驅(qū)動(dòng)都是變頻器控制
2.1硬件連接示意圖
2.2 千盟防搖技術(shù)參數(shù)
l QM防搖控制器的防搖定位精度能達(dá)到<20mm;
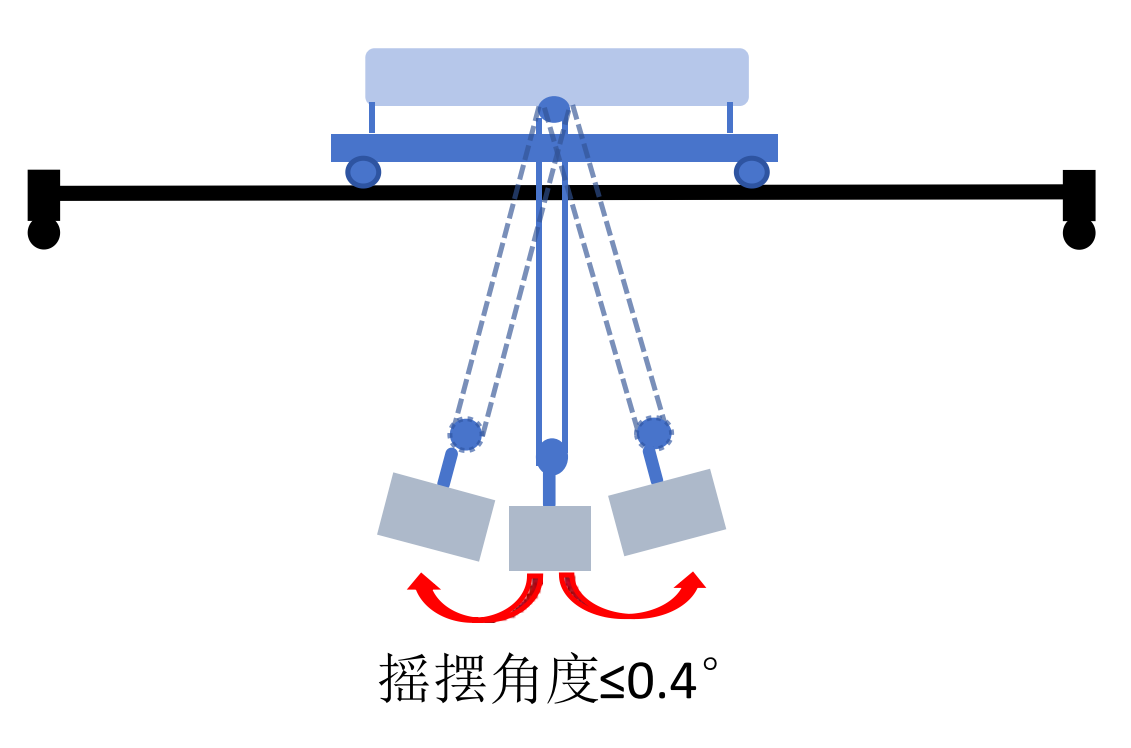
l QM防搖控制器的防搖角度<0.4°;
l QM防搖控制器實(shí)現(xiàn)大車小車兩軸聯(lián)動(dòng)。
2.2 QM防搖系統(tǒng)優(yōu)勢(shì)
l 延長(zhǎng)大車車輪與軌道的使用壽命、節(jié)約運(yùn)行成本。
l 消除橋式起重機(jī)的搖擺現(xiàn)象,實(shí)現(xiàn)起重物的安全運(yùn)輸。
l 對(duì)靜態(tài)的避障區(qū)域按設(shè)定的規(guī)則避讓,執(zhí)行必要的速度限制。
l 對(duì)一些必要的數(shù)據(jù)做合理性判斷,提供報(bào)錯(cuò)信息。
l 支持天車運(yùn)行期間作業(yè)暫停、目標(biāo)位置切換。
l 針對(duì)危險(xiǎn)區(qū)域,提供非靜止通過(guò)模式,能在考慮搖擺角度的情況下,最大程度地縮短天車從初始位置運(yùn)行到目標(biāo)位置的時(shí)間,提高整個(gè)作業(yè)過(guò)程的效率。
避障通過(guò)點(diǎn)非靜止通過(guò)與靜止通過(guò)的效率對(duì)比示意圖:
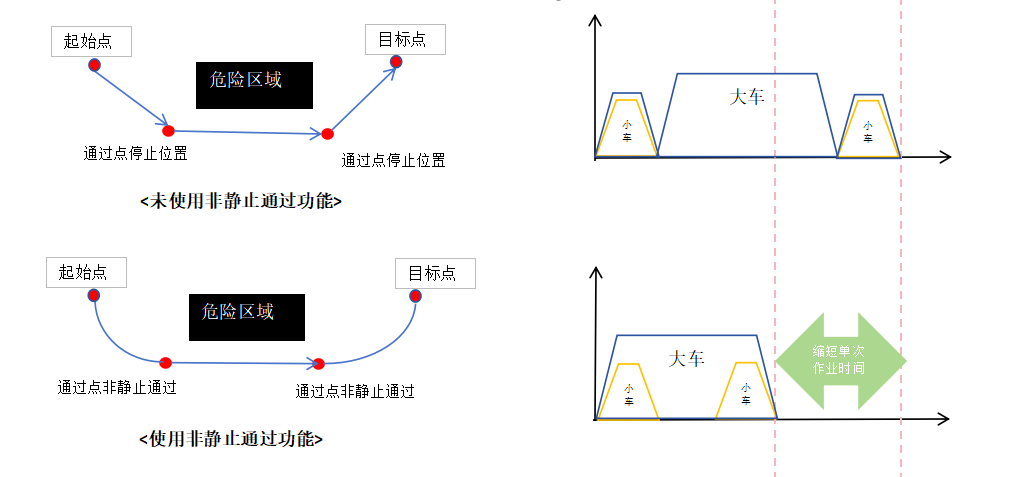
如上圖所示,在無(wú)人天車移動(dòng)區(qū)間內(nèi)避開(kāi)危險(xiǎn)區(qū)域時(shí),使用非靜止通過(guò)功能,天車收到指令,經(jīng)過(guò)避障通過(guò)點(diǎn)位置時(shí),天車運(yùn)行速度非0,繼續(xù)向目標(biāo)位置運(yùn)行。當(dāng)未使用非靜止通過(guò)功能時(shí),天車在起始點(diǎn)之后的每個(gè)通過(guò)點(diǎn)位置都速度降為0,再進(jìn)行啟動(dòng)向下一通過(guò)點(diǎn)運(yùn)行,直到到達(dá)目標(biāo)點(diǎn),這樣會(huì)產(chǎn)生頻繁且冗余的加速/減速時(shí)間,降低單次作業(yè)效率,從而降低總體作業(yè)效率。
l QM防搖控制支持開(kāi)環(huán)、閉環(huán)、手動(dòng)防搖控制模式,可實(shí)現(xiàn)多軸聯(lián)軸的防搖控制:
1. 開(kāi)環(huán)防搖控制模式
根據(jù)自動(dòng)模式的相關(guān)參數(shù)的設(shè)置,防搖控制器計(jì)算出最優(yōu)防搖速度曲線,實(shí)時(shí)輸出防搖速度給變頻傳動(dòng)系統(tǒng),來(lái)控制大車、小車執(zhí)行機(jī)構(gòu)的速度來(lái)消除吊物的搖擺,不帶角度測(cè)量模塊。
2. 閉環(huán)防搖控制模式
QM防搖控制器與角度測(cè)量模塊組成一個(gè)閉環(huán)防搖控制系統(tǒng),角度測(cè)量模塊由有紅外光源的防水相機(jī)和安裝在負(fù)載上的反光板組成,測(cè)量天車大車、小車兩軸方向的搖擺角度。對(duì)擺角與位置實(shí)現(xiàn)雙閉環(huán)控制。
3. 手動(dòng)模式
QM防搖控制器通過(guò)手動(dòng)模式的各個(gè)檔位對(duì)應(yīng)的速度,根據(jù)防搖算法計(jì)算出防搖速度曲線,實(shí)時(shí)將防搖速度傳遞給變頻器,控制大車/小車的平穩(wěn)運(yùn)行。
控制系統(tǒng)")
上升管是焦?fàn)t煉焦過(guò)程中產(chǎn)生的荒煤氣由炭化室向集氣管輸送的重要管道。目前大部分焦?fàn)t現(xiàn)場(chǎng),上升管管蓋和內(nèi)翻板的打開(kāi)與關(guān)閉以及..
詳情器人")
智能巡檢機(jī)器人在變電廠、石化廠等工業(yè)場(chǎng)景獲得基本的普及,代替巡檢人員完成巡檢工作,可以節(jié)省人力,提高安全系數(shù)。目前,在煤化..
詳情人天車系統(tǒng)")
傳統(tǒng)天車操作方式基本都是人工駕駛,主要依靠熟練司機(jī)手柄操作,地面指揮工配合,效率低下,搖擺厲害,安全可靠性差;且部分天車..
詳情人堆取料機(jī)")
傳統(tǒng)堆取料機(jī)操作方式基本都是人工駕駛,主要依靠熟練司機(jī)手柄操作,地面指揮工配合,效率低下,安全可靠性差;且部分堆取料機(jī)工..
詳情

0730-8206860
地址:湖南省岳陽(yáng)經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)康王工業(yè)園28號(hào)
版權(quán)所有 Copyright © 2019 湖南千盟工業(yè)智能系統(tǒng)股份有限公司 備案號(hào):湘ICP備20000218號(hào)-1營(yíng)業(yè)執(zhí)照查詢
湘公網(wǎng)安備 43060402000021號(hào)
智能系統(tǒng)股份有限公司")













